随着“智能化”浪潮的到来,国内外各大车企开始了自动驾驶领域的军备竞赛;国内造车新势力如蔚来、小鹏、理想等都在摩拳擦掌、各展神通,只为到2025年之前能轻松的获得无人驾驶赛道的一张入门券;

2019年6月,车机系统NIO OS通过OTA升级到NIO OS 2.0.0版本,NIO Pilot系统完成首次重大升级,新增了7项功能,包括高速自动辅助驾驶、拥堵自动辅助驾驶、转向灯控制变道、道路交互与通行标识识别、车道保持功能、前侧来车预警、自动泊车辅助系统;
2020年2月,车机系统NIO OS升级到2.5.0版本,NIO Pilot系统新增自动紧急制动(行人及自行车)、超车辅助以及车道内避让功能;
2020年10月,车机系统NIO OS升级到2.7.0版本,NIO Pilot系统加入了高精地图的使用,新增了自动辅助导航驾驶功能(NOA);在后方横穿车辆预警功能的基础上,增加了主动制动功能;将驾驶员疲劳监测功能进行了升级,新增了摄像头对对司机面部、眼部以及头部姿态特征的识别信息,通过多种信息做综合判定;
2021年1月,车机系统NIO OS升级到2.9.0版本,NIO Pilot系统新增视觉融合全自动泊车、车辆近距离召唤;对NOA功能来优化:增强了该功能在主动变道与汇入/驶离主路场景下的稳定性;
2021年1月,在蔚来日“NIO Day”发布了无人驾驶系统NAD,包含NIO Aquila蔚来超感系统和NIO Adam蔚来超算平台;并且将逐步实现覆盖高速、城区、泊车等全场景下的点到点的无人驾驶功能体验。

1)Xpilot2.0:无人驾驶辅助系统Xpilot的首个正式产品落地化版本
2019年1月,首次向小鹏G3用户推送OTA升级,升级的Xpilot2.0系统新增了车辆钥匙召唤功能;优化了自动泊车功能:自动泊车将适配更多场景,支持带有阴影的停车位,地锁识别更加精准;
2019年6月,通过OTA向小鹏G3用户推送Xmart OS 1.4版本,升级完成后的小鹏G3将具备ICA智能巡航辅助功能(60km/h以上LCC车道居中辅助);
2020年第四季度:XPILOT 3.0的基础功能完成交付,即通过OTA开放ACC/LCC/ALC等功能;
2021年第一季度:通过OTA向P7用户推送了Xmart OS 2.5.0版本,通过这次升级,搭载XPILOT 3.0系统的小鹏P7具备了高速道路-NGP自动导航辅助驾驶功能;
2021年6月:开始了Xmart OS 2.6.0版本的公测,通过这次升级,Xpilot3.0系统新增停车场记忆泊车、智能远光灯以及驾驶员状态监测;同时对NGP自动导航辅助驾驶功以及车道居中功能进行了优化;

理想汽车的无人驾驶研发进展与蔚来、小鹏这两家相比稍微靠后一些,但自从2020年7月公司赴美IPO,以及9月原伟世通首席架构师王凯加入理想后,理想汽车明显加快了无人驾驶领域的研发步伐;
李想在2020年的一次访谈中公布了理想汽车自动驾驶发展的路线年:实现自动导航辅助驾驶功能;2)2023年:推出全新车型理想X01 - 配备支持L4级自动驾驶能力的硬件系统3)2024年:在量产车型上,通过OTA实现L4级自动驾驶能力
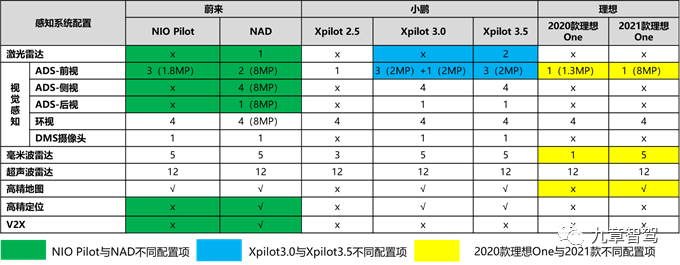

注:1)√有此配置 ,N/A 不适用,— unknown2)蔚来ET7的11个800万高清摄像头中有部分摄像头的供应商是联创电子;通过查询联创电子官网,了解到该公司在车载摄像头的应用领域主要是环视和后视,因此可推断蔚来ET7的环视摄像头很大概率是由联创电子供货。
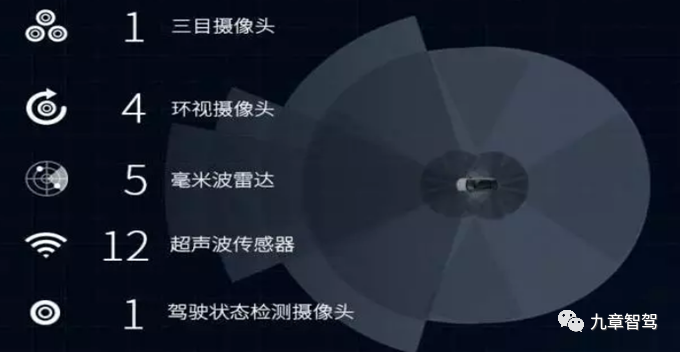
三目摄像头主要实现的功能如下图所示:实现功能:道路标识识别、远近光自动控制、车道偏离预警、车道自动保持、紧急制动辅助、前向碰撞预警
b.毫米波雷达:1个前置长距离雷达 + 4个角雷达实现功能:车道变换预警、车辆盲点监控、侧方开门预警、前向来车预警、后向来车预警
2) NAD- 感知系统蔚来Aquila超感系统:感知传感器+高精度定位单元(GPS+IMU)+车路协同感知V2X感知传感器:激光雷达*1 + ADS摄像头*7 + 环视摄像头*4 + 毫米波雷达*5+超声波雷达*12
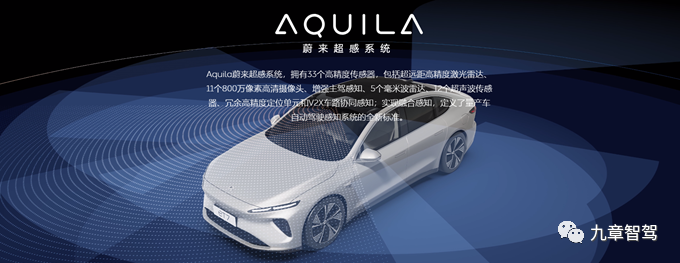
7颗ADS摄像头(8MP):前视*2(前风挡)+ 侧前视*2(车顶前部两侧)+ 侧后视*2(翼子板) + 后视*1(车顶后部居中)

在城市场景下,传感器视线非常容易被绿化带和车辆遮挡,相较于安装在 B 柱和后视镜的摄像头,部署在车顶的高位侧前摄像头,能够减小盲区;
布置在车顶高位侧前摄像头,因位置高,故视野广,提高了前向视觉的冗余度。即使前向主摄像头不工作,依靠两个高位侧前摄像头,仍旧能实现前向视觉的完整感知。


1)Xpilot 2.5 - 感知系统感知系统配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*3+超声波雷达*12

注:紫色圆圈-前置中距毫米波雷达*1,橙色圆圈-后置近距毫米波雷达*1,绿色圆圈-环视摄像头*4,蓝色圆圈-前置主摄像头*1,红色圆圈-超声波雷达*12。
2) Xpilot 3.0 - 感知系统感知系统配置:感知传感器+高精度地图(高德)+高精度定位
感知传感器:ADS摄像头*9+环视摄像头*4+毫米波雷达*5+超声波雷达*12+DMS摄像头*1
9颗ADS摄像头:前置三目(前风挡)+前置单目(前风挡)+侧前视*2(后视镜底座)+侧后视*2(翼子板)+后视*1(牌照板上部)
b.前置单目-安全冗余感知摄像头(前风挡):像素-2MP,帧率-69fps
3) Xpilot 3.5 - 感知系统感知系统配置:感知传感器+高精度地图(高德)+高精度定位感知传感器:激光雷达*2+ADS摄像头*8+环视摄像头*4+毫米波雷达*5+超声波雷达*12+DMS摄像头*1重点传感器介绍a.激光雷达(大疆Livox-HAP)性能参数:
b.8颗ADS摄像头:前视*3(前风挡,2MP像素)+ 侧前视*2(后视镜底座)+ 侧前视*2(翼子板)+ 后视*1(牌照板上部)


理想汽车自动驾驶系统感知方案对比注:√有此配置 ,N/A 不适用,— unknown,(E)据推测
a.前置摄像头性能参数提升:老款理想One前置单目摄像头为130万像素,水平视角52°;新款理想One配置的单目摄像头为800万像素,水平视角120°
1)2020款理想One - 感知系统传感器配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*1+超声波雷达*12

注:上图可以看到前风挡位置有3颗摄像头:a. 上方的2颗中只有②为ADS摄像头,即用于行驶过程中的驾驶辅助摄像头;b. 另外1颗摄像头①为数据采集与收集摄像头,专门用于收集道路信息和驾驶场景等数据信息,便于后续对相关算法的训练与优化;c. 最下方的③摄像头为行车记录仪摄像头;
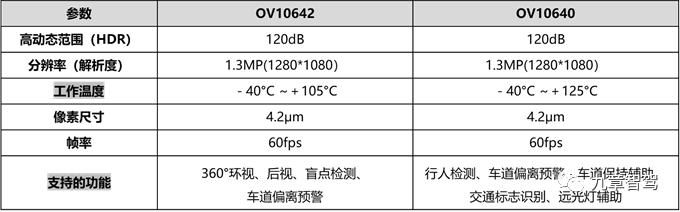
重点传感器介绍:前置单目ADS摄像头(豪威科技-OV10642)和环视摄像头(豪威科技-OV10640)
传感器配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*5+超声波雷达*12
感知系统配置:激光雷达*1+ADS摄像头*8(E)+环视摄像头*4+毫米波雷达*5(E)+超声波雷达*12+DMS摄像头*1


1)NIO Pilot 自动驾驶计算平台硬件:Mobileye-EyeQ4芯片(感知处理运算)+恩智浦-S32V芯片(决策处理运算)

2)NAD 自动驾驶计算平台蔚来超算平台NIO Adam(由4颗英伟达Orin芯片构成)性能:


Xpilot系统计算平台信息梳理1)XPilot 2.5 自动驾驶计算平台
b.英飞凌Aurix MCU:(RISC处理器核心、微控制器和DSP整合在一个MCU)
自研部分包括:XPU的平台软件(Xpilot系统架构)以及Xpilot 系统应用层软件:包括OTA、诊断服务、虚拟化、摄像头服务、CAN服务、自动驾驶应用(感知、定位、预测、路径规划等)等
Li OS基于Linux内核深度定制开发,定制开发的部分包括:a. 内核的文件系统、IO系统和Boot引导等核心部分; b. 与其它应用层通讯的中间件部分;应用层部分则选择与战略供应商合作开发;
1)NIO Pilot系统基础功能免费,对于精选包和全配包采用一次性付费模式;
2)NAD采用按月订阅付费的模式:除一些基础功能外,如果想要拥有NAD的完整功能需采用“按月开通、按月付费”的服务订阅模式,即ADaaS(AD as a Service)。
3)NAD系统会在NIO Pilot系统的基础上,新增一些基于场景的、集成式的高阶自动驾驶类功能:换电站自动泊车,NAD低速及泊车自动驾驶等功能
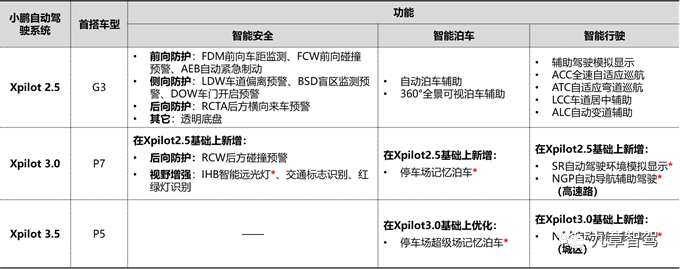
Xpilot 3.0具备较强软件升级能力,后续通过OTA升级能力可新增:智能远光灯、停车场记忆泊车、NGP自动导航辅助驾驶(高速路)、SR自动驾驶环境模拟显示
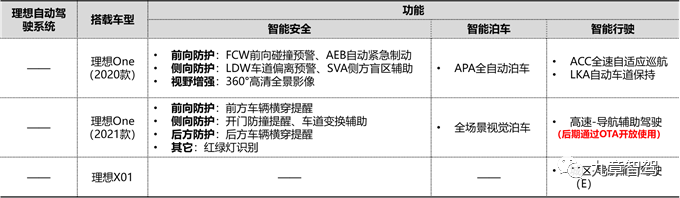
1)2020款理想One:主要是实现L2级驾驶辅助功能,在L2+高级别驾驶辅助功能上有所欠缺;
a. 由于车辆没有配置能够监控车辆后方的长距离传感器,比如说毫米波雷达或侧后视/后视ADS摄像头,因此在快速行驶时车辆后方防护能力较弱;较难以较好地实现车辆后方碰撞预警、并线辅助以及自动变道等功能;
在2020年理想One接连发生追尾大货车的事故,这些事故原因主要有以下两种情况:
第一:理想One当时开启了辅助驾驶功能,但前车侵入本车道1/3-1/2时,ADAS仍未识别前车;
第二:理想One的辅助驾驶感知传感器对侧前方车辆识别能力较差,对于在光线弱的黑夜更是形同虚设。因此,除了软件算法因素之外,传感器前向感知能力的局限性也是另外一个重大原因,首先2020款理想One的前置摄像头是单目,且视场角为52°,并且车辆两侧也没有布置角雷达,对于光线较弱的情况下感知能力较差,因此对于侧面快速插入的车辆识别较晚。因此2021款理想One自动驾驶系统相关硬件配置的升级也自然是情理之中的事情了。
2)2021款理想One:前置摄像头采用800万的高清摄像头,水平视角120°,并且增加了4个角雷达,增强了对后方以及前方两侧中长距离目标物体的感知能力;相比老款理想One,增加了红绿灯识别功能、前方车辆横穿提醒、后方车辆横穿提醒、开门防撞提醒等功能;
1. 从三家造车新势力的自动驾驶研发规划及自研布局来看,他们的战略布局方向较为一致,均是想要打造全栈自研的自动驾驶能力;因为未来车型的硬件将会趋同,企业的软件能力或者说软硬件一体化能力将是其核心壁垒;

2. 在未来高阶自动驾驶的感知解决方案上,三家造车新势力均将采取激光雷达+毫米波雷达+摄像头多种传感器冗余感知的“强感知”路线;但自动驾驶技术的进化,除了要软硬结合外,数据更是关键,只有不断积累中国复杂路况下的本土用户数据,持续优化软件算法,才能打造出差异化的自动驾驶体验;中国本土企业更了解中国特色的道路场景,中国用户的驾驶习惯,所以有机会能更先一步迭代出在中国场景验更好的自动驾驶技术;比如适用中国道路下的一些特色功能:加塞预警、夜间超车提醒、大货车规避等;
3. 在自动驾驶计算平台方面,蔚来、小鹏、理想三家早期均是选择较为封闭的Mobileye解决方案,导致其难以有效获取和利用底层视觉数据,因此后期纷纷转向选择与开放程度更高的英伟达合作;未来有实力的企业将形成AI芯片自研+自动驾驶域控制器自研(合作开发)的研发模式,如此模式,再结合自研的软件算法,能够充分发挥出自动驾驶计算平台的最优性能;
4. 在量产车型的功能实现方面,更加注重用户具体使用场景的落地;从用户场景出发,逐步实现停车、高速、城区三大场景下点到点的自动驾驶;
5. 当前自动驾驶技术处于不断迭代发展的阶段,OTA能轻松实现车辆软件快速迭代,进而能够持续为已经交付给用户的车辆增加新的功能或优化现有功能;但新功能的OTA也是跟硬件强相关的,如果硬件不支持,单靠软件照样无法实现。但现在量产车型上安装的硬件大都还没办法做到一步到位,OEM只能凭各自的实力尽力而为-“能向前兼容,尽量向前兼容”。




